First post!
Woohoo, this is my first post on my website. Hopefully I will keep on updating the pages
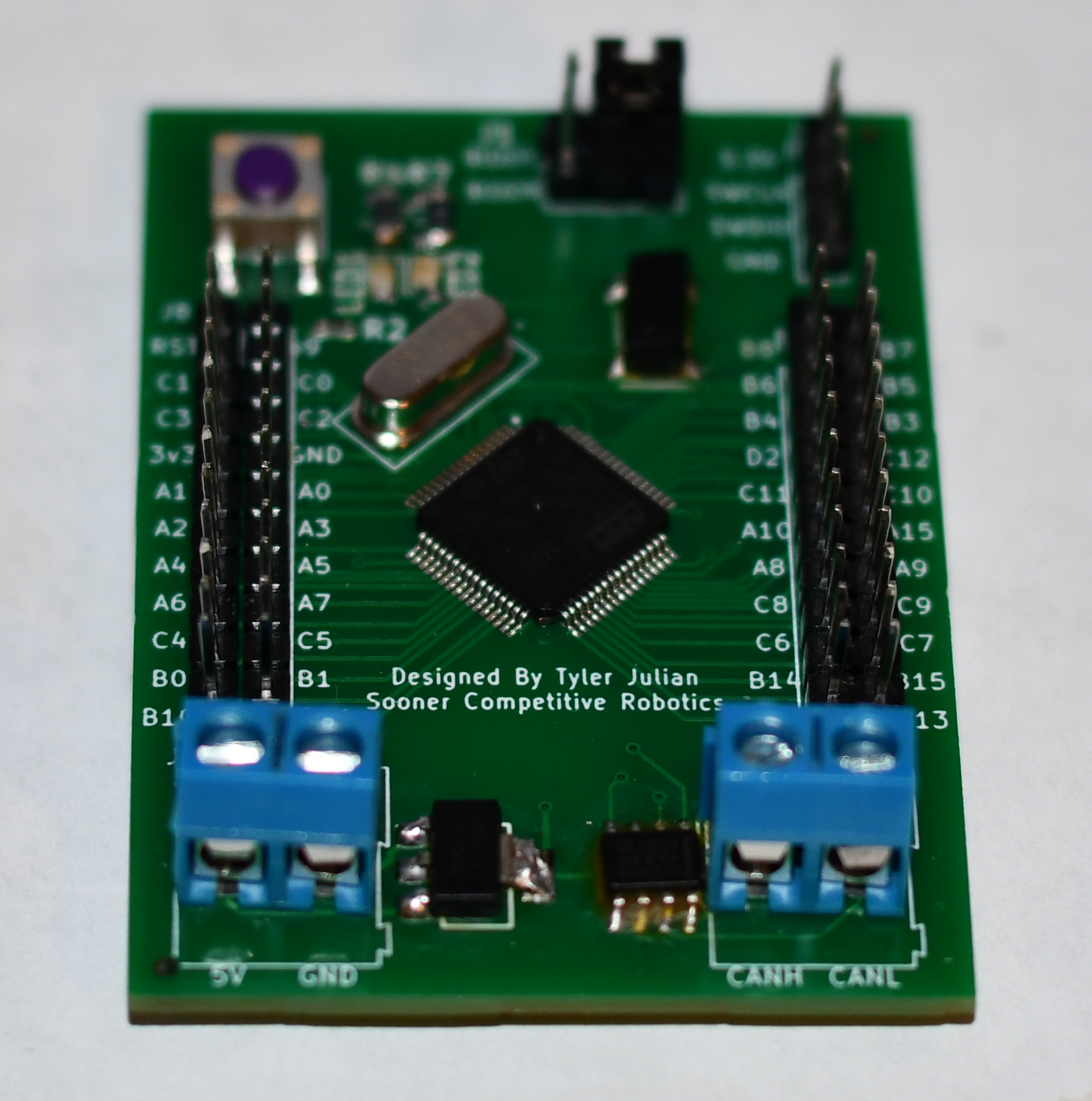
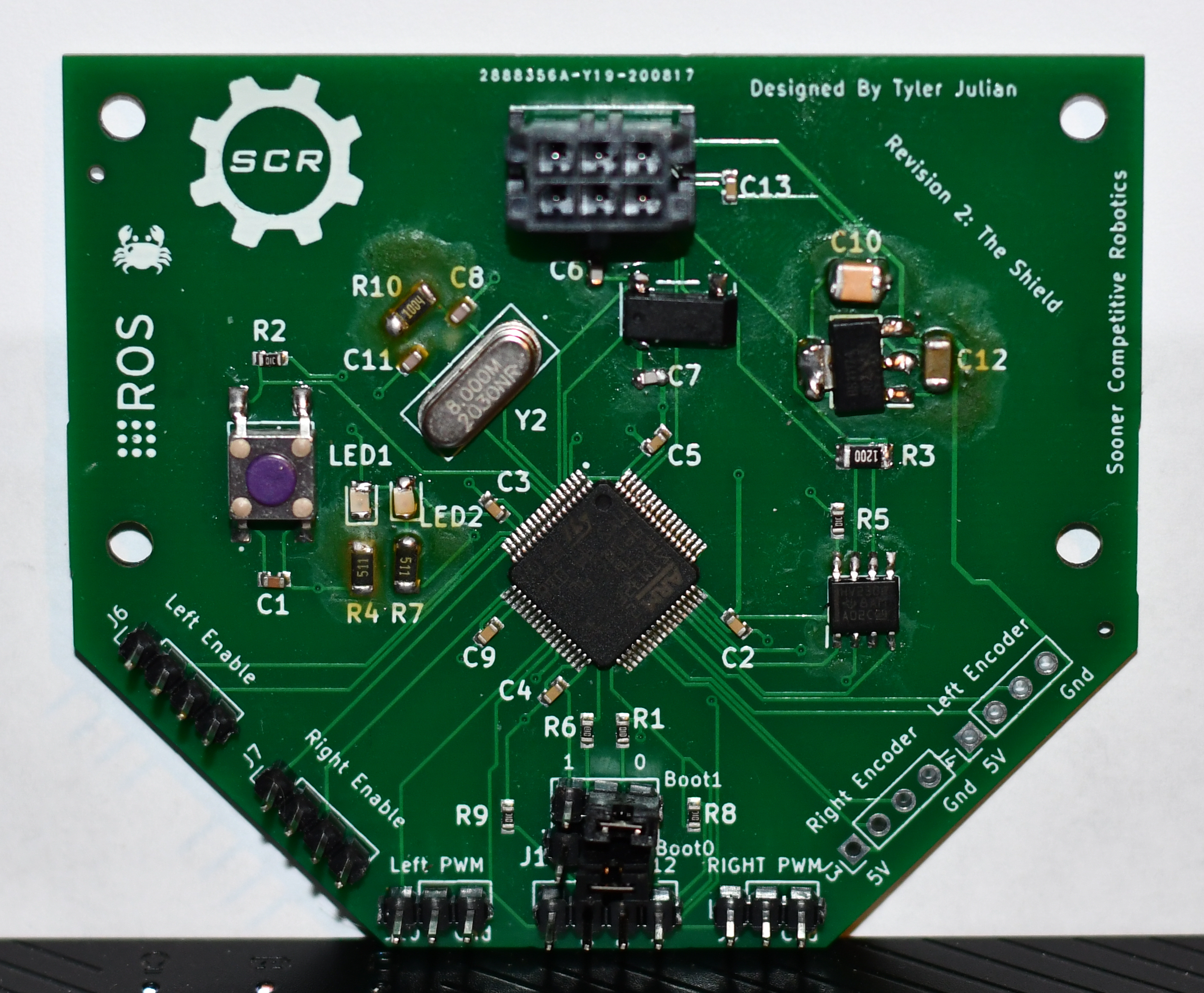
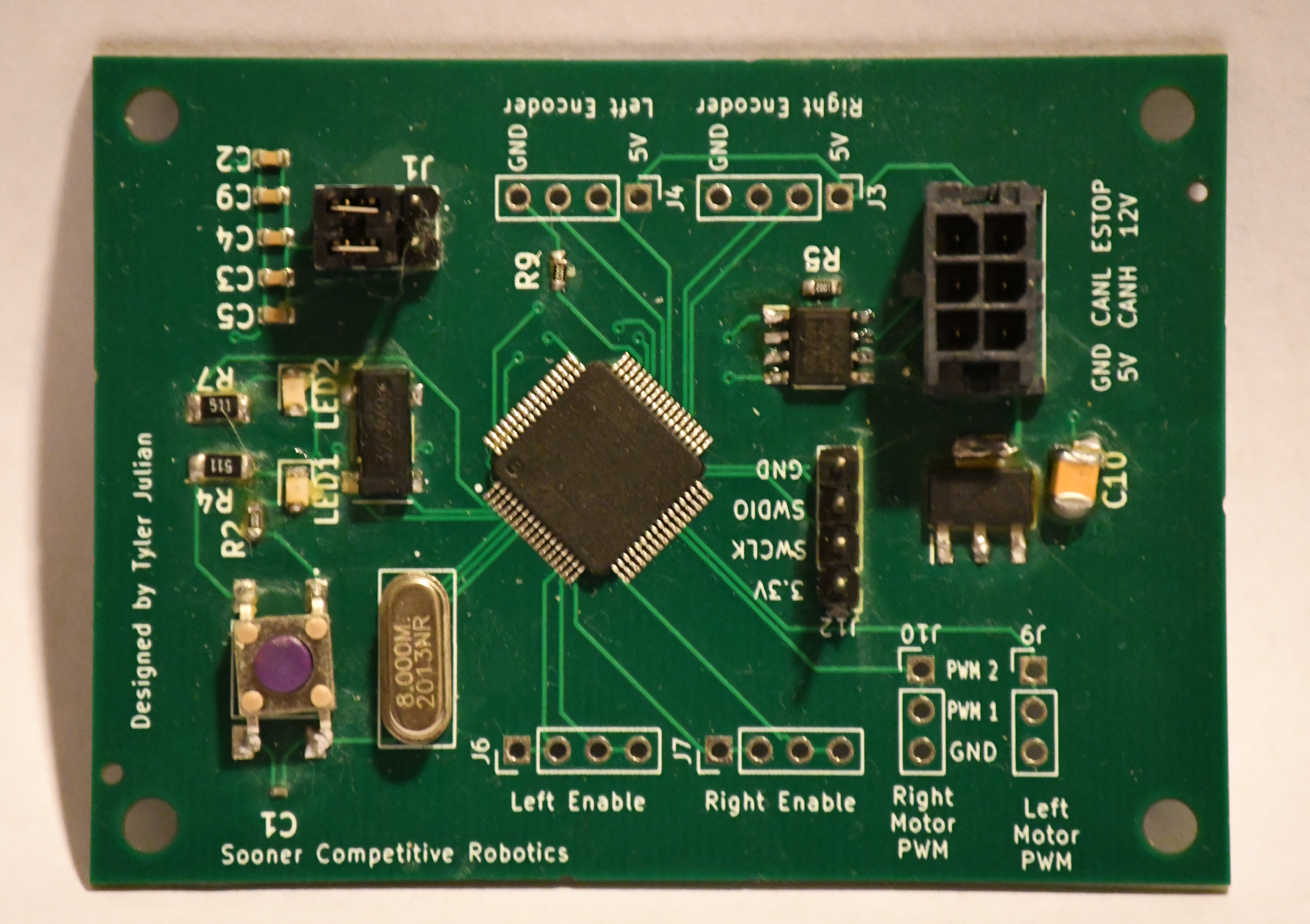
I designed a PCB with a STM32F103rct6 microcontroller that has ports for motor control, encoders, and CAN-Bus protocol. I wrote firmware to control the CAN-bus, PWM, Interupt, and GPIO pins. A PID is implemented using software to control the speed of the motors. The board is programmed using SWD. Each board has a CAN-bus transceiver.
There are two variations of the board. A generic development board and the motor controller board described above.

Woohoo, this is my first post on my website. Hopefully I will keep on updating the pages